Levy
Properties
| Description | Value |
|---|---|
| Robot name | Levy |
| Parameter names | param_a, param_b |
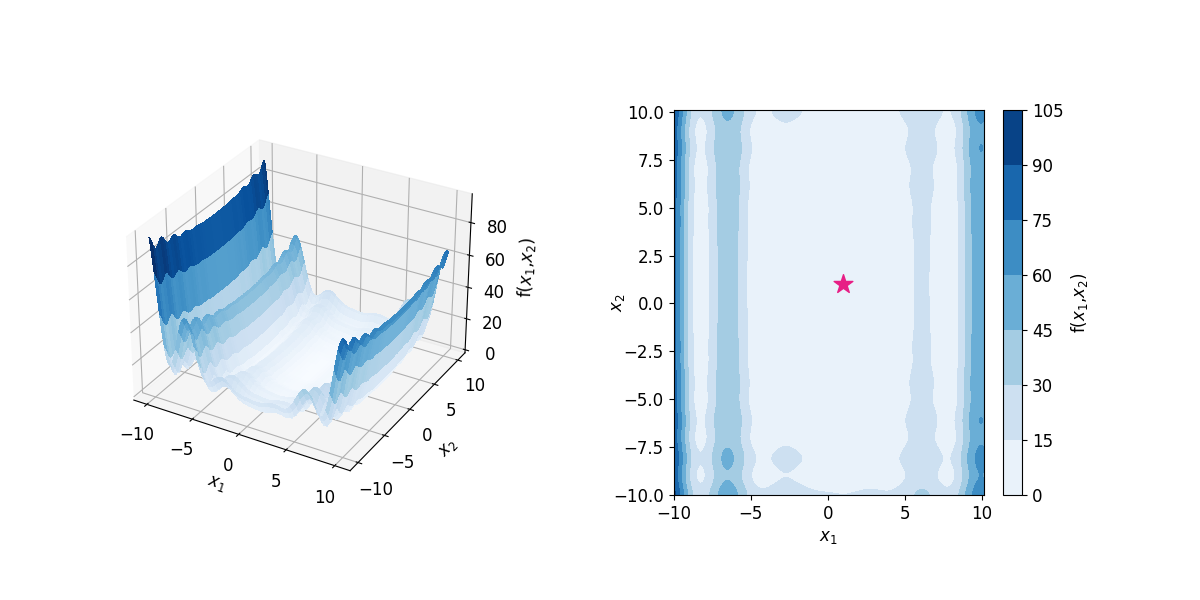
| Range of each parameter | [-10, 10] |
| Measurement name | levy |
| Optimization type | Single objective |
| Minima location & value | (1, 1): 0.0 |
| Maxima location & value | (-10, -10): 95 |
Function
\[
f(\textbf{x}) = f(x_1, ..., x_N)= sin^2(\pi w_1)+\sum_{i=1}^{N-1}(w_i-1)^2[1+10sin^2(\pi w_i+1)] + (w_d-1)^2[1+sin^2(2\pi w_d)], \space where \space w_i=1+\frac{x_i-1}{4}, \space for \space all \space i=1,...,N
\]